




Article URL: https://macleans.ca/society/i-had-100000-in-debt-so-i-moved-into-my-car/
Comments URL: https://news.ycombinator.com/item?id=41923901
Points: 12
# Comments: 18
https://macleans.ca/society/i-had-100000-in-debt-so-i-moved-into-my-car/


Article URL: https://www.cnn.com/2024/10/23/investing/boeing-losses/index.html
Comments URL: https://news.ycombinator.com/item?id=41923998
Points: 36
# Comments: 37
https://www.cnn.com/2024/10/23/investing/boeing-losses/index.html

Article URL: https://www.zapspace.net/defender_sound/
Comments URL: https://news.ycombinator.com/item?id=41911575
Points: 36
# Comments: 9

Article URL: https://ojs.aaai.org/index.php/AIES/article/view/31742
Comments URL: https://news.ycombinator.com/item?id=41921725
Points: 22
# Comments: 6

Article URL: https://bernsteinbear.com/blog/row-poly/
Comments URL: https://news.ycombinator.com/item?id=41922081
Points: 85
# Comments: 14
 Is Hiring Web Scraping/Crawling Engineers")
Article URL: https://www.newscatcherapi.com/career/web-crawling-scraping-engineer
Comments URL: https://news.ycombinator.com/item?id=41922556
Points: 0
# Comments: 0
https://www.newscatcherapi.com/career/web-crawling-scraping-engineer

Article URL: https://eukaryotewritesblog.com/2024/10/21/i-got-dysentery-so-you-dont-have-to/
Comments URL: https://news.ycombinator.com/item?id=41919365
Points: 26
# Comments: 6
https://eukaryotewritesblog.com/2024/10/21/i-got-dysentery-so-you-dont-have-to/
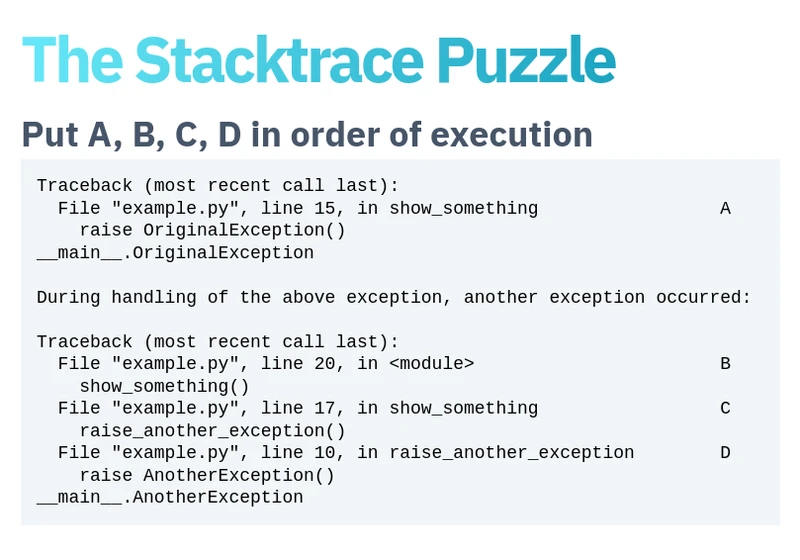
Article URL: https://www.bugsink.com/blog/chained-stacktraces-puzzle/
Comments URL: https://news.ycombinator.com/item?id=41921280
Points: 7
# Comments: 2

Article URL: https://sqlite.org/forum/forumpost/b7e2d83c0bcfae1e
Comments URL: https://news.ycombinator.com/item?id=41921673
Points: 54
# Comments: 14